
マシンビジョン
3D接着剤塗布検査システム

3D接着剤塗布検査システムは2D接着剤塗布検査システムの機能を踏まえて、ゴムテープの高さ、ゴムテープの断面積などの検査項目を追加し、より要求の高い塗装品質検査、例えばエンジンシリンダのビードフィラーへの検査、自動車のフロントとリアウィンドガラスのビードフィラーへの検査、電池ケースの接着剤シール検査などに適しています。
検査の原理:
カメラはレーザービームでテープをスキャンし、撮影でテープの断面輪郭を獲得し、
アルゴリズムで輪郭を分析し結果を計算します。そのうち、スキャン方式とプロファイル分析アルゴリズムは外観検査のコアとなります。
製品特徴:
√ デュアルカメラによる死角なしの検査で、光学視野を拡大し、自己遮蔽を防ぎます。
√ 360°自動回転装置で、二度と視界から外れることはなありません。
人工智能打刻字符3D检测系统
3D外観検査システムは、主に3Dプロファイルセンサーによってターゲットの3Dプロファイルデータを取得し、ビジョンソフトウェアの助力でデータを分析・処理することで、サイズ測定、欠陥検出、ターゲット認識などの目的の達成を図ります。3D外観検査システムは、ターゲットの幅、高さなどの情報をより全面的に取得でき、さらに干渉防止の能力が強く、検査精度が高い利点があり、部品の3D寸法測定、ワーク組立精度の測定、欠陥検査などの項目に広く応用することができます。
ビジョンの原理:
高度グレースケールイメージで文字の所在領域を切り取り、領域内外のグレースケール平均値の差を計算し、変換をして深さ値を算出し、認識した文字領域とテンプレートを比較し差異を見出す方法で欠陥を検出します。
3D文字外観検査の汎用ソフトウェアの互換性:
円盤プレス彫刻技術、ダイヤモンドマーキング技術、レーザーマーキング技術。
瑞視3D輪郭形状測定機(OEM)、キーエンス3D輪郭形状測定機、コグネックス3D輪郭形状測定機、LMI3D輪郭形状測定機、その他のブランド3D輪郭形状測定機。
三つの主要な技術面の優位性:
3Dポイントクラウドイメージング技術。文字に対して高精度、全方位の検査を行います。
AI識別技術。異なる自動車メーカーの文字形態認識機能に対応できます。
OPC通信技術。顧客のMESシステムの生産指示とのデータ比較が可能。
プロジェクト事例
自動車VINコード検査
取引先の需要:
1.文字の内容、文字の高さ、文字の片側偏差、文字全体の偏差、文字の傾斜度、文字の深さ、文字の完全性の検査を完了可能。
2.測定精度が0.01 mm未満。
3.検査の正確率が99.9%に達します。
2D接着剤塗布検査システム
2D接着剤塗布検査システムは、ビジョンとロボット(plc)との間の信号相互作用によって塗布効果の画像収集処理を完成し、塗布の幅、面積、位置、連続性などの品質要因を分析し、検査結果を表示し不良品に警報を出し、接着剤塗布品質を全面的に監視することを目的とする検査システムです。需要に応じて、固定式、追従式に分けられます。同システムは、異なる色、異なる形の接着剤塗布タイプの検査に向いて、応用範囲が非常に広いです。
ビジョンの原理:
1. 撮影した画像の中に接着剤の位置決めを行います。
2. 接着剤位置決めの結果に基づいて接着剤塗布検査の範囲を決定し、処理速度と精度を加速させます。
3. 接着剤の境界画像に基づいて接着剤の特徴データを抽出します。
4. 接着剤の特徴データを処理し、接着剤の幅を測定します。
5. 設定した検査用最大と最小データに基づいて検査結果を判断し、OK/NGを判定します。
製品の用途:接着剤漏れ、接着剤巻き、接着剤が薄すぎること、接着剤が広すぎること、接着剤の量が多すぎること、接着剤の位置ずれ、接着剤の不連続。
両眼視覚システム
両眼視覚システムは主に2セットのカメラレンズ、光源、画像処理産業用パソコンからなり、両眼視覚技術を利用し、ワークの6自由度の位置決め(X、Y、Zの3方向の位置と角度)を実現し、偏差を矯正した後に正確につかみ取れるようロボットを誘導し、各種の生産ラインの材料搬送、組立、積み卸しなどに幅広く応用できます。カメラは固定設置またはロボットクリッパに装着可能で、その視野が全局をカバーし、拡張可能性が強く、新車種の追加が容易です。
ビジョンの原理:
両眼立体視覚は、二つのカメラによって異なる位置からワークの画像を収集し、測定されたワークの同じ特徴点に対応する画像の視差に基づいて深度情報を計算し、最後に、複数の測定された点の3D位置情報から空間上のワークの位置と姿勢を算出します。
プロジェクト事例
自動車フロントフロアワークの掴み取り
顧客の要求:自動車のフロントフロアワークをトレーの上に置かれ、傾斜した滑り槽を通じてフィードするが、当該フィード方式には誤差と傾斜が存在し、両眼視覚技術を利用してワークの6自由度の位置決めを行い、ロボットが正確に掴み取るよう誘導する必要があります。
最終結果:両眼カメラをスタンドに固定して取り付け、ワークが指定位置に搬送されたときに、両眼視覚システムが撮影し、ロボットが正確にワークを掴み取るよう誘導します。システムは安定的に稼働し、正確率が99.9%以上に達します。
自動車サイドパネルワークの掴み取り
顧客の要求:自動車のサイドパネルワークはAGVで自動的にフィードするが、フィードしたたびにワークの位置と傾斜角には一定の偏差が存在し、両眼視覚技術を利用してワークの6自由度の位置決めを正確に行い、ロボットが正確に掴み取るよう誘導する必要があります。
最終結果:両眼カメラをスタンドに固定して取り付け、ワークが指定位置に搬送されたとき、両眼視覚システムが撮影し、ロボットが正確にワークを掴み取るよう誘導します。システムは安定的に稼働し、正確率が99.9%以上に達します。
オンライン測定視覚システム
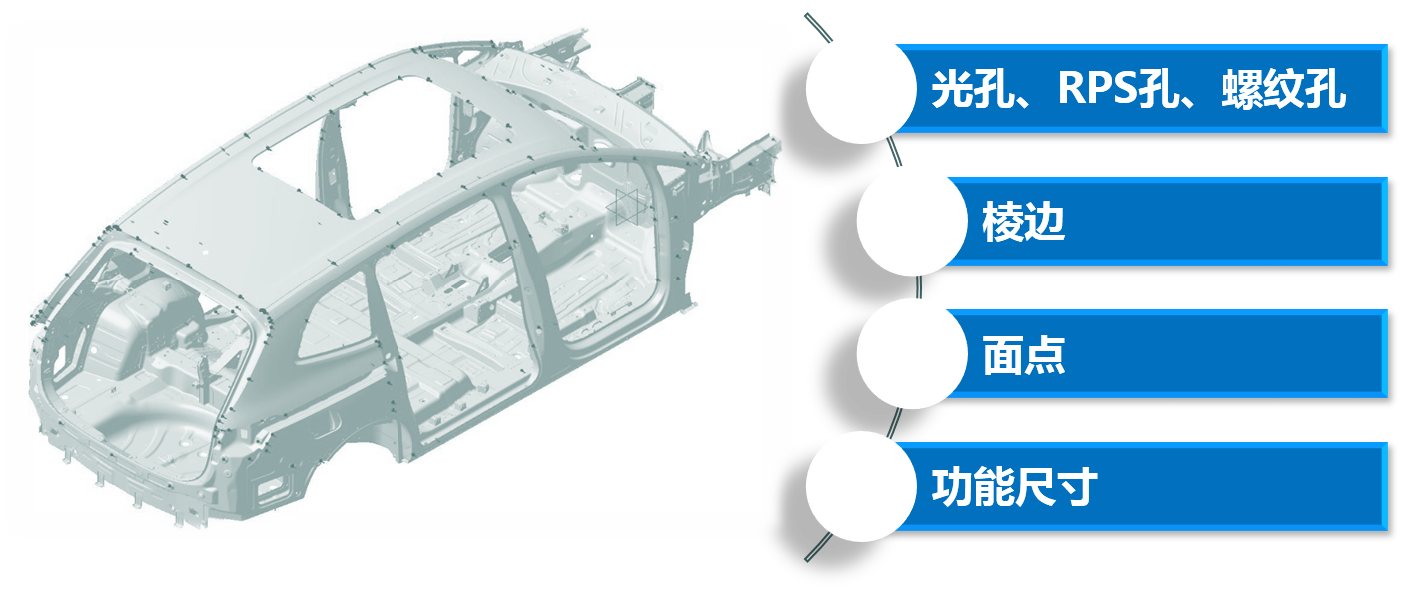
外観検査技術とレーザー測定技術に基づき、三角測量原理をベースに、ロボットのフレキシブルポジショニング上の優位性と組み合わせて、測定された特徴の3Dスペース座標を取得し、オンライン非接触式の寸法精度測定システムを実現します。当該システムは、車体骨格の精度に影響を与える重要な寸法、例えばフロントガラス窓の寸法、ドアの取付位置の辺の位置、位置決め穴の位置、各サブアセンブリの位置などを測定することができます。また、他の非接触式で精度が求められる特定のシーンでも使用できます。
同測定システムは測定結果のリアルタイムな表示や誤差オーバーのタイムリーなアラーム提示を実現でき、さらに測定されたポイントの傾向図、偏差分布、CP、CPK、6Sigma、最大値、最小値、平均値、標準偏差などの統計値をも表示できます。
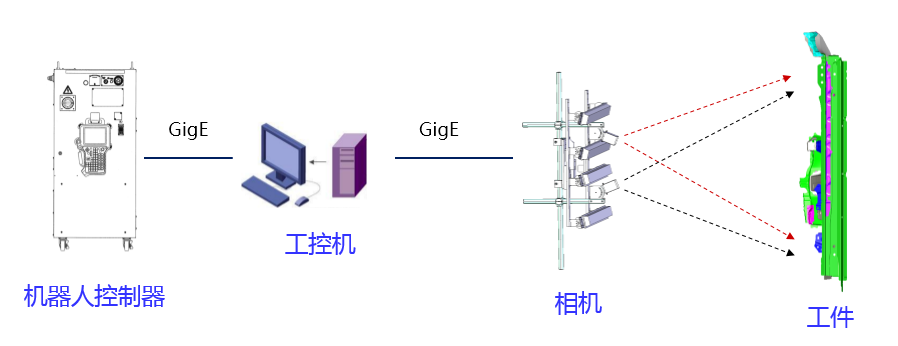
3Dレーザービジョン測位システム
3Dレーザービジョン測位システムは主に3Dレーザー、産業用コンピューターとビジョンソフトウェアからなり、ロボットが3Dレーザーを所定の位置に持ち込んで写真を撮影し、ビジョンソフトウェアによって画像演算が行われて、得られたワークの偏差値をロボットに送信し、ロボットが自動的に偏差を修正した後、最終的にワークを正確に掴み取るよう誘導します。3Dレーザーには3Dレーザー機能と2D撮影機能が含まれます。3Dレーザー機能は、三角光切断原理に基づき、線形レーザービームを利用して測定された特徴の高さ、傾斜および回転量を取得し、2D撮影機能と組み合わせて特徴の中心を決めることで、標準ワークに対する対象ワーク全体の偏差値を求めます。当該システムのレーザー局所イメージングは、通常、複数台が必要とし、さまざまな生産ラインの超大型ワーク(例えば、自動車のサイドパネル)の材料搬送、掴み取るなどのプロジェクトニーズに適しています。
プロジェクト事例
サイドパネルアセンブリーワークの誘導式掴み取り
顧客の要求:視覚位置決めシステムを利用して、台車庫からサイドパネルアセンブリーのワークを掴んで組立場所に配置。
検査内容:搬送車内部にあるサイドパネルアセンブリー
視覚システム解像度:0.147mm/pixel
レーザー装置の台数:3台
単一カメラの視野範囲:380mm*285mm
作業距離:400mm
位置決めリズム:単一ワークの検査時間が10秒未満。
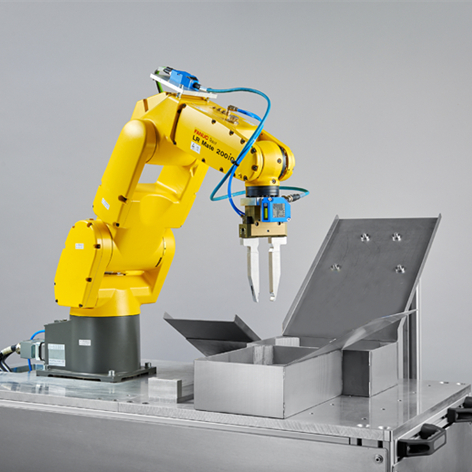
AI+3D知能化仕分けシステム
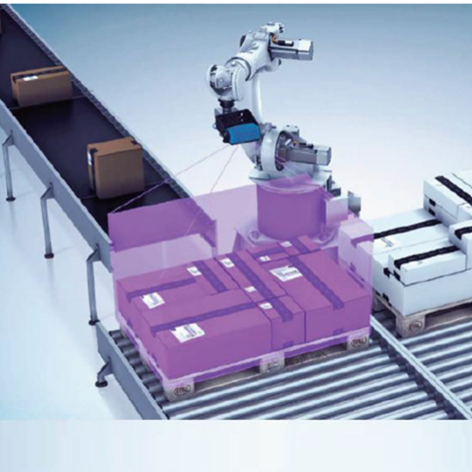
同システムは両眼構造化照明カメラをベースにし、ディープラーニング技術に基づくターゲット認識・位置決め3Dビジョンソフトウェアを搭載し、完全な仕分け・取り卸しシステムソリューションを構成しております。
両眼構造化照明カメラは、RGB画像と3Dポイントのクラウドデータを取得した後、3Dビジョンソフトウェアを用いてデータ処理を行い、識別された目標の分割結果、姿勢と位置決め、および掴み取り場所の座標情報を発信し、最後にロボットの掴み取る座標に変換し、ロボットをターゲット実体に移動させ、自動掴み取りを実現します。
構造化照明3Dイメージングの原理:構造化(ストライプまたは散点)照明を利用してスペースをエンコードし、カメラが撮影した後にデコードすることで、深度画像を生成します。この技術は、物体やカメラの移動が不要になり、短時間で3D輪郭情報を迅速に取得できます。
3Dレーザー

瑞松科技が独自に研究開発した3Dレーザーは、簡単な構造とスペースの節約を実現する上に、2D画像と3D検査機能を兼ね備えて、カメラ、レンズ、レーザーを柔軟に選択し、異なるワーク、工程、作業状況に対するビジョンシステムの処理能力と適応性を向上させます。レーザー、MIG、MAG、プラズマなど、すべての一般的な溶接分野に適用でき、同時にフィード誘導、知能化全自動組立、検査などの分野にも使用できます。
特徴:
柔軟な対応:2Dポジショニングと3D位置決めの機能を兼ね備え、カメラ、レンズ、レーザーの柔軟な選択が可能で、各種の作業状況に柔軟に対応できます。
柔軟な対応:レーザー、MIG、MAG、プラズマなどのすべての一般的な溶接分野に適用でき、さまざまなロボットインターフェースを対応できます。
強い干渉抵抗:アルミニウムやステンレス鋼など反射加工表面の検査に適し、光学フィルターや高出力ダイオードレーザーを配置したことで、レーザーヘッドに干渉光に対する非常に高い干渉抵抗力を持たせました。
精確な検査:日本ライブラリ関数を採用し、より正確な検査を提供し、さらに顧客の特殊なニーズに応じて、ソフトウェアのカスタマイズな二次開発を実現します。
一体化設計:画像処理のために設計された一体化コントローラは、画像とデータのリアルタイルな保存を可能にし、アプリケーション層、ストレージ、ビジョン処理の底層の一体化設計を実現します。